
Membre VIP

Patch de téléphone portable Robot parallèle coller
[appartient à la grande catégorie]: applications fonctionnelles [caractéristiques du produit]: application de robots parallèles sur le patch de téléph
Détails du produit
Présentation de produits
Ruiyi Smart - fournisseur de solutions complètes pour les équipements d'automatisation industrielle et la fabrication intelligente
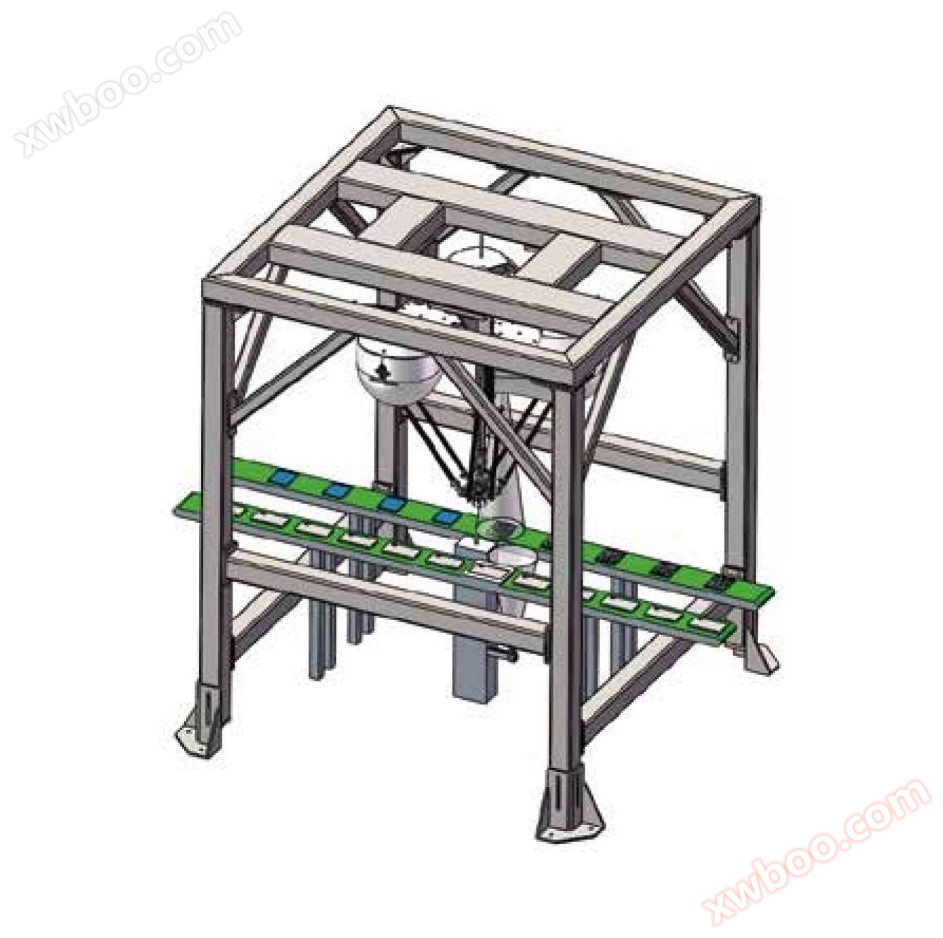

Certains clients dans l'assemblage de téléphone mobile dans la liaison de collage de patch, il y a une demande pour rejoindre la chaîne de production robotique entièrement automatique, pour contourner le processus existeTaux élevé de non - conformité、Rythme de production lentEtL'apparence du produit n'est pas assez belleAttendez une série de questions.


Dans le cas, la bande transporteuse arrive avec 50 Une boîte de patch. Premier envoi à la caméra 1 Où, effectuer la reconnaissance de position, le robot à entraînement direct de burkent ajuste l'angle en fonction de l'information, saisir avec précision le mouvement du patch à l'encollage, puis la caméra 2 L'identification secondaire du contour extérieur du patch, les informations de position sont communiquées au robot, le contrôle de sa rotation à l'endroit où il doit être collé avec le téléphone pour un collage final * * *. Si la caméra 1 Lorsque la boîte d'identification est vide, le client sera averti du changement.
Tout au long du processus, la précision du robot atteint0,01 mmLa précision finale du processus est strictement garantie, ce qui permet de réaliser des gains d'efficacité tout en réduisant l'empreinte du site de l'équipement.

| Résultats après la mise en œuvre | données |
| Réduire la main - d’œuvre | 0 personnes |
| Croissance de l'efficacité | 33% |
| Beat de production | 60 / min |
| Taux de non - conformité | 0 |
| Zone d'occupation | 9㎡ |
| Période de récupération des investissements | 2 ans |
Cette application est en3Célectronique、Articles de ménage、Nourriture et boisson, papeterieDe nombreuses industries sont largement utilisées.Nanjing ruiyi Smart Technology Co., Ltd peut être adapté aux besoins du client.

| Nanjing ruiyi Smart Technology Co., Ltd |
| Adresse: no.28 fenghu Road, zone de concentration industrielle de Jiangning Dongshan, Nanjing, Chine |
| Téléphone |
| Fax: |
| Coopération commerciale veuillez contacter | |||
|
Balayer avec Wechat
|
||

Enquête en ligne
-
Contacts
-
Société
-
Téléphone
-
Courriel
-
sur WeChat
-
Code de vérification
-
Contenu du message
-